
该系统的优点主要体现在以下四个方面:
首先,研究小组实现了三维空间(XYZ轴)内多个机器人的控制,而不仅仅是二维平面。
其次,实验中的环境模拟更加真实,包含了水流等动态因素。即使在这样的条件下,也能保持机器人的稳定控制。
第三,本研究突破了受控机器人数量的限制,可以在复杂环境下同时控制5个以上的机器人,这在以往的研究中很难实现。
最后,这种新颖的机器人设计不仅考虑了实际应用环境,还集成了药物输送和血管栓塞等医疗功能,使其成为实际医疗应用的解决方案。
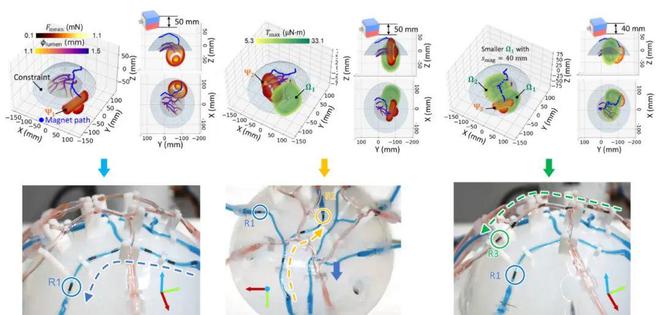
图丨三维空间中的多机器人部署(来源:Science Advances)
由于该课题组使用永磁体来控制机器人,因此永磁体本身的特性相当复杂。
在深入研究机器人控制的过程中,研究人员面临建模等方面的挑战,例如复杂永磁体的使用导致控制难度增加等。
此外,在血管内等复杂流场环境中,机器人与管壁或血管壁的相互作用也非常复杂。需要建立磁场控制模型和机器人本身的动力学模型。
“我们的目标是以直观的方式清楚地解释这些复杂的概念,以方便用户操作。”王春香说道。
为了厘清这些复杂的概念,研究人员采取了“多管齐下”的方法,包括广泛阅读学术论文、理论探索以及大量实验来验证相关假设。
尽管研究人员在研究初期发现实验结果与他们最初提出的模型不一致,但他们并没有放弃。相反,他们基于不断的实验和修正迭代优化模型,使其更加准确和可靠。
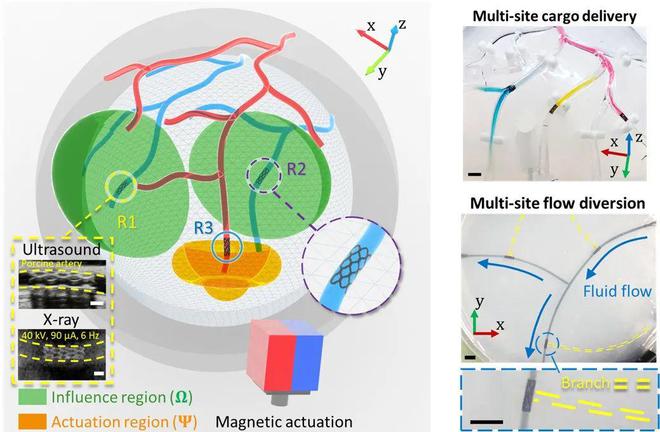
图丨系统概念图及应用(来源:Science Advances)
在中风治疗中,传统方法是通过导管持续注射溶栓药物,但这种方法会损伤其他健康血管。本研究提出的解决方案是利用机器人技术实现药物的精确输送并减少对健康组织的副作用。
王天禄解释道:“中风往往会涉及多条血管同时堵塞,我们的技术优势在于能够控制多个支架机器人[2],有效解决多条血管堵塞的问题。”
据悉,团队目前正在进行动物实验,计划进一步完善机器人的结构和材料的生物相容性。同时,他们也在将这些机器人与现有的医疗系统进行整合,比如与CT、超声等设备配合,更好地满足临床应用。
未来,随着技术的不断优化,软磁控机器人在多点给药、复杂病灶多点诊治、多部位流体控制等领域将具有广阔的应用潜力。
尤其是在多发性脑动脉瘤、脑肿瘤、血栓等疾病的治疗中,该系统有望提供更快、更精准的治疗。
此外,结合传感和电子模块,该系统还有望应用于多点生理监测、疾病早期发现、个性化治疗等领域。
参考:
1.王C.等。三维流明中的异构多个软毫机器人。《科学进展》10,1951(2024)。
2.王T.等人。自适应无线微机器人运动进入远端脉管系统。自然通讯 13, 4465 (2022)。
排版:何辰龙、刘亚坤
本文采摘于网络,不代表本站立场,转载联系作者并注明出处:http://www.mjgaz.cn/fenxiang/273797.html
